
Da a perspettiva di a struttura funziunale, l'esekzione di u generatore di vacuum hè principarmenti a valvula di cuntrollu elettromagnetica per cuntrullà u generatore di vacuum per rializà a generazione di pressione negativa è ferma, in modu di ottene a funzione di attruisce è di liberazione di u travagliu.
In u risultatu, u sistema in generale include i seguenti cumpunenti: 1. Fonte d'aria compressa;2. Filtru;3. Cambia valvola solenoid;4. Attuatore di vacuum;5. End suction cup, air bag, etc. (Una struttura tipica hè mostrata in a figura sottu).
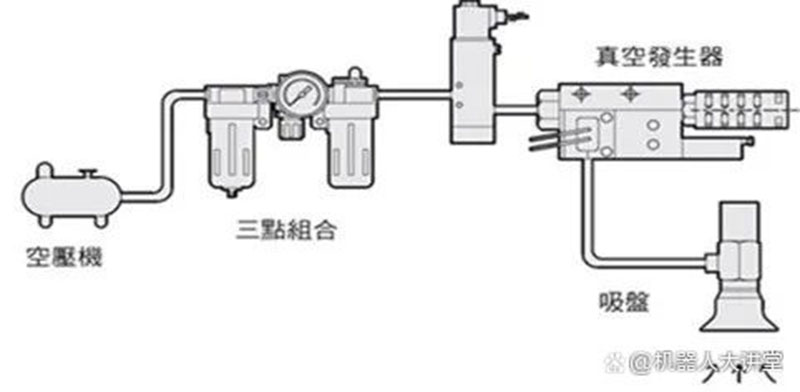
Inoltre, sottu à i requisiti di l'automatizazione industriale, per rializà u monitoraghju di u prucessu di adsorption à vacuum, certi fabricatori generalmente aghjunghjenu cumpunenti di cuntrollu pneumaticu cum'è metri di flussu, interruttori di rilevazione di pressione è interruttori di prossimità à u sistema in l'ultimi anni.
In ogni casu, postu chì a maiò parte di i cumpunenti sò mudificate da l'integratore secondu i bisogni di u cliente è e cundizioni di travagliu in situ, a cumplessità di tuttu u sistema hè spessu alta.
À u listessu tempu, parechji pruduttori di cumpunenti portanu à un travagliu cumplessu di installazione è di cumissioni in u situ, è alcuni di elli anu un altu cunsumu d'energia è una dipendenza di 100% da e fonti di gas.L'integrazione parziale pò esse micca pussibule
Evite a contaminazione di u rumore, chì significa prublemi inaccettabili per ambienti d'alta precisione è puliti, cum'è batterie di lithium è semiconduttori.
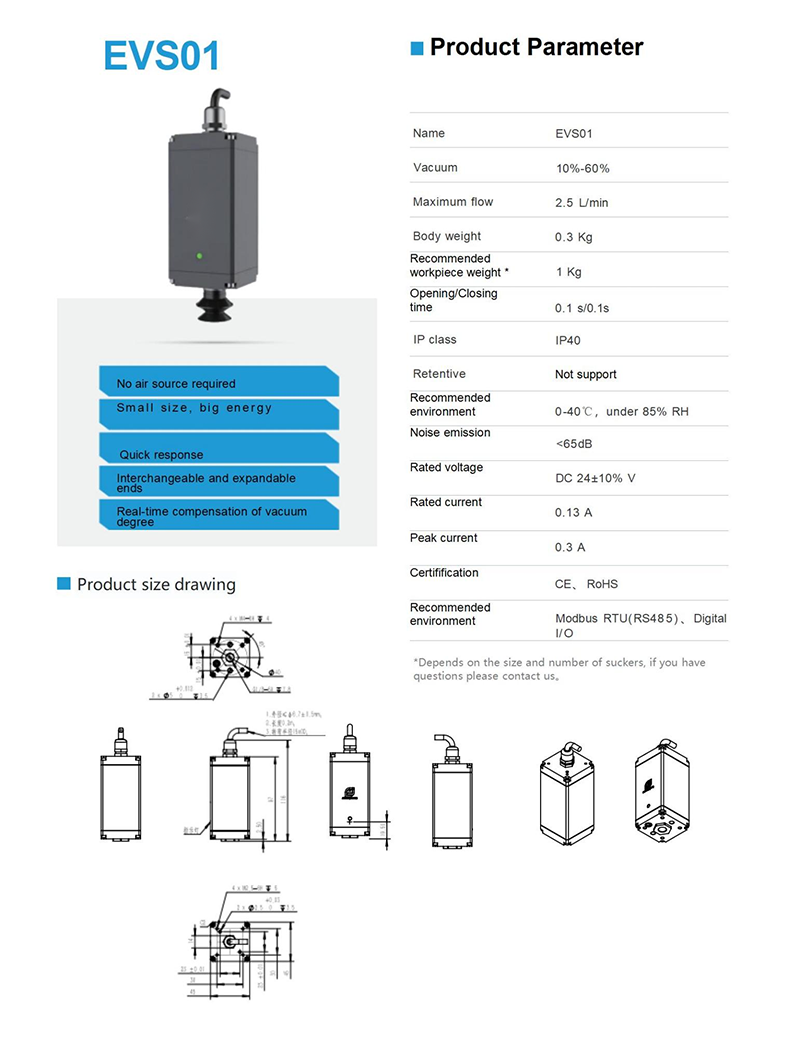
In generale, EVS hè una nova generazione di attuatore di vacuum elettricu intelligente chì ùn hà micca bisognu di una fonte d'aria cumpressa supplementaria, chì hè senza dubbitu attraente.
U più grande benefiziu di u sistema di risparmiu d'aria hè a so facilità di stallazione.Perchè questu pò senza dubbitu riduce assai cumpunenti ausiliari, cumpresi i compressori d'aria, i tanki di almacenamentu d'aria, l'equipaggiu di purificazione di l'aria, è i tubi di output, etc., rendendu u cablaggio più faciule è più còmode è chjaru per i clienti à aduprà.
Hè infurmatu chì in u prisente, assai sceni cumpresi piattaforme robot mobile, assemblea elettronica 3C, fabricazione di batterie di lithium, fabricazione di semiconductor, logistica express, etc.
Batteria quadrata di aspirazione EVS08
Più dettagli è vantaghji
A sala di lettura di u robot hà amparatu chì stu pruduttu, chì pare assai chjucu è pesa solu 2,5 kg, pò ghjunghje à un altu livellu di 10 kg.A causa di u disignu di bassa tensione 24V, u cunsumu d'energia hè di 20% di u sistema pneumaticu tradiziunale, è a forza di adsorption à a fine pò esse stabilita è aghjustata, è a forza di adsorption pò ghjunghje à 102-510N.
In quantu à u disignu strutturale, EVS adopta un disignu strutturale più compactu è ligeru, chì face EVS 30% più chjucu cà l'aerodinamica tradiziunale per u stessu pesu di carica.
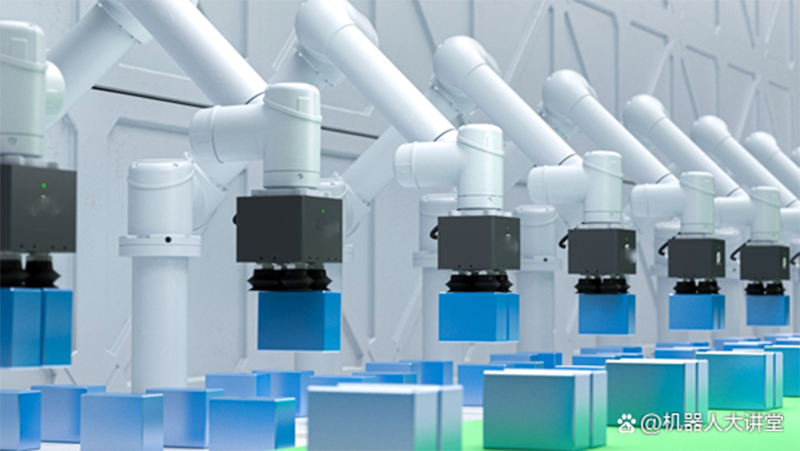
À u listessu tempu, pò esse direttamente cunnessu à u connettore à a fine di u bracciu roboticu, chì riduce i cumpunenti ausiliarii redundanti, rende più flexible à l'usu, pò esse implementatu rapidamente, è pò facilmente assorbe parechji ogetti grandi, soprattuttu adattatu per stacking, handling è altre operazioni di scena.
Per migliurà a cunvenzione di l'usu, l'attuatore di vacuum elettricu hà ancu una interfaccia integrata, chì pò esse usata per cuntrullà è monitorizà tuttu u prucessu di adsorbing objects.
Hè infurmatu chì questu hè per a cunvenzione di i clienti per cuntrullà u gradu di vacuum di l'attuatore di vacuum attraversu l'istruzzioni, è ancu cunnette cù u ligame IO per u monitoraghju è u mantenimentu predittivu di u prucessu di adsorption.U monitoraghju di u statu riducerà l'errori è i tempi di inattività è assicurà a dispunibilità di u sistema.
In questa basa, i vantaghji è e caratteristiche di EVS sò ancu riflessi in i punti seguenti:
1. Struttura compacta è pesu ligeru: EVS hè 30% più chjucu cà a dimensione pneumatica tradiziunale quandu assorbe u stessu pesu di carica.Pò esse cunnessu cù u connector à a fine di u bracciu meccanicu per rializà l'assorbimentu di a carica, soprattuttu adattatu per stacking, handling è altre operazioni di scena;
2. Abundante cunfigurazione di u terminal: Diversi tipi di ventose, airbags è altri cumpunenti ponu esse cunfigurati per rializà l'afferramentu di diversi ogetti, cumpresi cumpunenti quadrati, sferichi è in forma speciale;
3. Doppiu canali pò esse cuntrullati indipindentamente: facilmente cuntrullà i lati di manca è di diritta di l'attuatore di vacuum, è i dui lati sò indipindenti di l'altri, migliurà ancu l'efficienza di u travagliu di a linea di produzzione.Realizeghja aspirazione è piazzamentu à u stessu tempu, chì facilita assai a manipulazione è a classificazione di l'uggetti, risparmiendu spaziu è tempu;
4. Suction Adjustable: u gradu di vacuum pò esse aghjustatu secondu e caratteristiche di u pruduttu aspiratu, è a compensazione di vacuum in tempu reale pò esse realizatu;
5. Status feedback: Hà un sensoru di feedback di vacuum, chì pò detectà u statutu di adsorption di l'uggetti in tempu reale, è furnisce feedback è alarme;
6. Power-off prutezzione: Dopu à power-off, si pò rializà adsorption power-off self-locking à prutege l 'uggetti adsorbed;
7. Forte adattabilità: supportu 24V I / O è u protocolu di cumunicazione MODBUS RTU (RS485);
8. Facile à stallà è debug: u protocolu di cumunicazione hè simplice è leghjite, chì riduce assai a difficultà di debugging.Inoltre, u software di debugging di l'urdinatore ospitante pò esse attaccatu cum'è un rigalu, chì pò esse stabilitu è editatu per stabilisce i paràmetri di funzione offline.
Conclusioni è u futuru
Sutta a tendenza di l'automatizazione è l'intelligenza, l'attuatori elettrici di vacuum sò diventati sempre più un cumpunente chjave per assicurà u funziunamentu normale di robots è sistemi d'automatizazione, rendendu l'usu di sistemi di attuatori elettrici più convenienti è facili d'utilizazione, è ponu scuntrà scenarii più diversificati cum'è robots cumposti mobili..
L'interfaccia integrata è a ricca cunfigurazione di u terminale è altre ottimisazioni ponu ancu migliurà l'affidabilità di i cumpunenti chjave di u robot, riducendu l'interruzzione di a produzzione è i prublemi di implementazione remota per l'utilizatori finali, è riduce ancu i costi di mantenimentu è post-vendita.
Tempu di post: Apr-19-2023